
About me
Hi, I’m Alex. I work on computer vision and robot learning at NVIDIA.
Recently, my work at NVIDIA has focused on Vision-Language-Action models and Imitation Learning for humanoid robots. Previously, I worked on high-performance real-time 3D reconstruction. I have a PhD in computer vision and robotics from ETH Zurich. I spent the final part of my Ph.D. as a visiting scientist in the Microsoft Mixed Reality & AI Zurich Lab.
I love working with passionate small teams on hard problems that lie at the intersection of mathematics, software, and physical systems.
Work at Nvidia
Open-source things that I’ve worked on at NVIDIA.
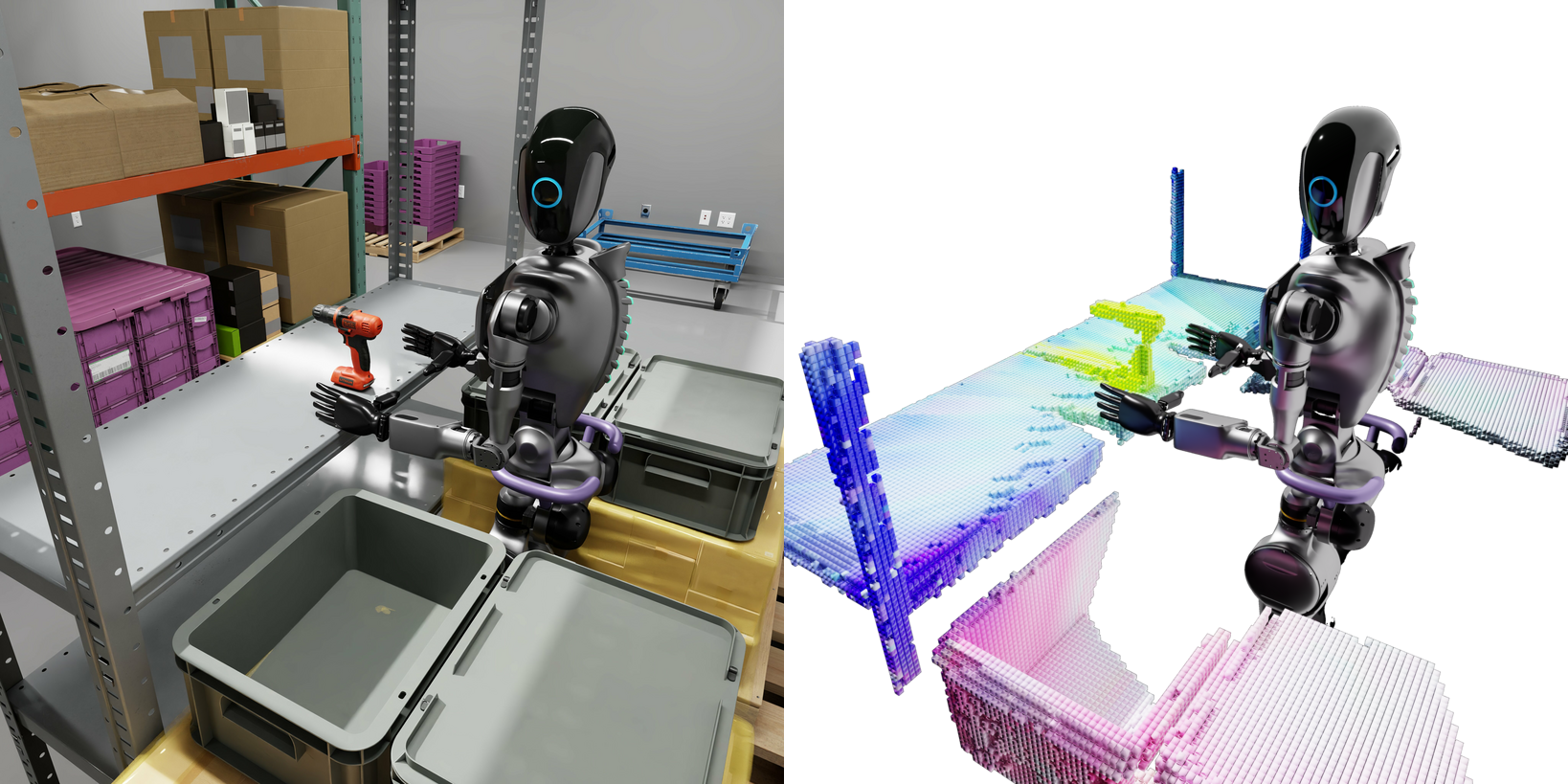
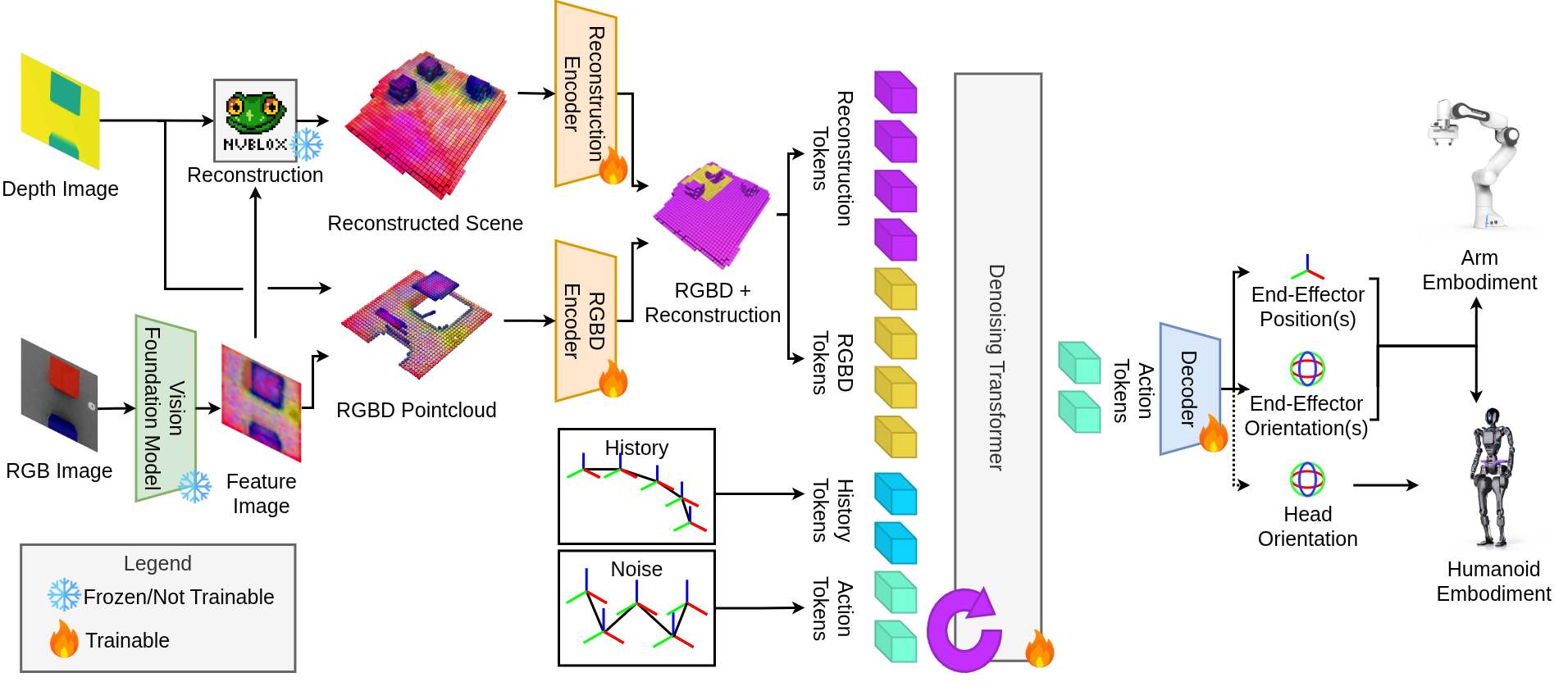
Spatial Memory in Humanoid Manipulation
End-to-end learning has emerged as a promising approach towards intelligent robotic manipulators. Current approaches, however, lack spatial memory, which leads to surprising limitations in their capabilities. In this work we show how by providing a metric-semantic reconstruction to a denoising transformer based manipulation model, new capabilities for learning-based manipulation models are unlocked.
Paper and code coming soon.
NVIDIA Perceptor
We integrated nvblox into a system for Autonomous Mobile Robot (AMR) navigation. The system combines multi-cam real-time reconstruction with deep-learned stereo and visual motion tracking from a set of cameras that surround the robot. nvblox was upgraded with features for motion segmentation to support navigation in environments with moving elements in the scene. Check out the video and code.
nvblox: GPU-Accelerated Real-time Reconstruction for Robotics
nvblox is a real-time reconstruction library for NVIDIA GPUs, including embedded devices. The library has been used in robot navigation, robotic manipulator control, mapping and robot learing research. The library is open-source. Try it out!
Selected Publications
A full list of publications may be found my google scholar page.
nvblox: GPU-Accelerated Incremental Signed Distance Field Mapping
Alexander Millane*, Helen Oleynikova*, Emilie Wirbel, Remo Steiner, Vikram Ramasamy, David Tingdahl, Roland Siegwart
International Conference on Robotics and Automation (ICRA), 2024.
* contributed equally
Freetures: Localization in Signed Distance Function Maps
Alexander Millane, Helen Oleynikova, Christian Lanegger, Jeff Delmerico, Juan Nieto, Roland Siegwart, Marc Pollefeys, and César Cadena
IEEE Robotics and Automation Letters, 2020.

Free‑Space Features: Global Localization in 2D Laser SLAM Using Distance Function Maps
Alexander Millane, Helen Oleynikova, Juan Nieto, Roland Siegwart, and César Cadena
IEEE International Conference on Intelligent Robots and Systems (IROS), 2019
Voxgraph: Globally Consistent, Volumetric Mapping using Signed Distance Function Submaps
Victor Reijgwart*, Alexander Millane*, Helen Oleynikova, Roland Siegwart, César Cadena, Juan Nieto
IEEE Robotics and Automation Letters, 2019
* contributed equally
C-blox: A Scalable and Consistent TSDF-based Dense Mapping Approach
Alexander Millane, Zachary Taylor, Helen Oleynikova, Juan Nieto, Roland Siegwart, César Cadena
IEEE International Conference on Intelligent Robots and Systems (IROS), 2018
Projects
Autonomous Fire-Fighting
In this project we built a system for autonomously finding fires in multi-story buildings as part of our entry to the MBZIRC 2020 international robotics competition. The mission is completed by a collaborating robotic team, consisting of a hexacopter and a tricopter. The approach exploits the mapping and precise control capabilities of each of the vehicles respectively. If you’re interested, check out our video.

Thermal Mapping
In this work we showed a UAV building dense 3D maps, localizing within these maps, and autonomously navigating through narrow spaces to find potential injured people using a thermal camera. We demonstrated this at a search and rescue training site in Switzerland. If you’re interested, check out our video.